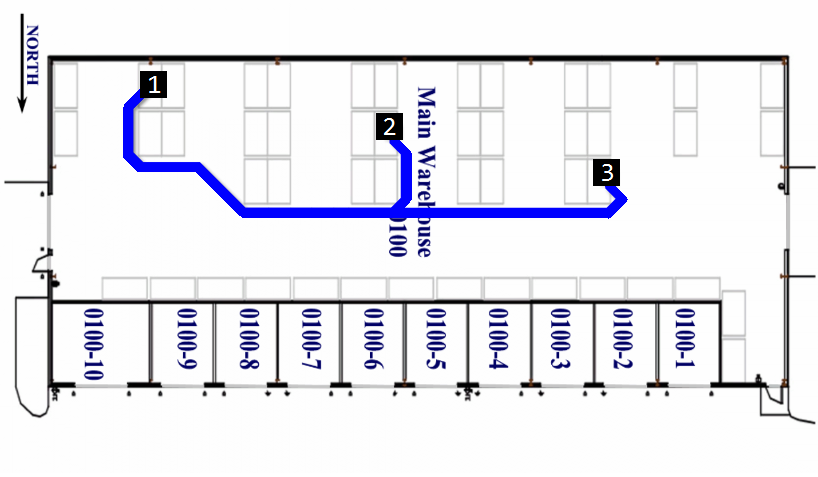
Two years ago I had implemented a proof-of-concept that showed walking directions in a warehouse to complete a picking list. The idea is to visually represent what a picker has to do, and where they have to go, while calculating the minimum distance they have to walk. It will make it easier to get the job done for pickers that are not familiar with a warehouse, like temporary staff. And the business benefit is to minimize picking time, to make savings in labor costs, and to increase throughput. Also, we can save performance data on the ground, derive the gap between goals versus results, and use that as a feedback loop for continuous improvement of internal processes.
I had used my previous work on geocoding of stock locations in M3, and I had used Will Thimbleby‘s JavaScript implementation of the A* search algorithm to calculate and show the shortest path between two stock locations. I yet have to integrate the Traveling Sales Problem (TSP) algorithm for the entire picking list similar to my previous work on delivery route optimization for M3.
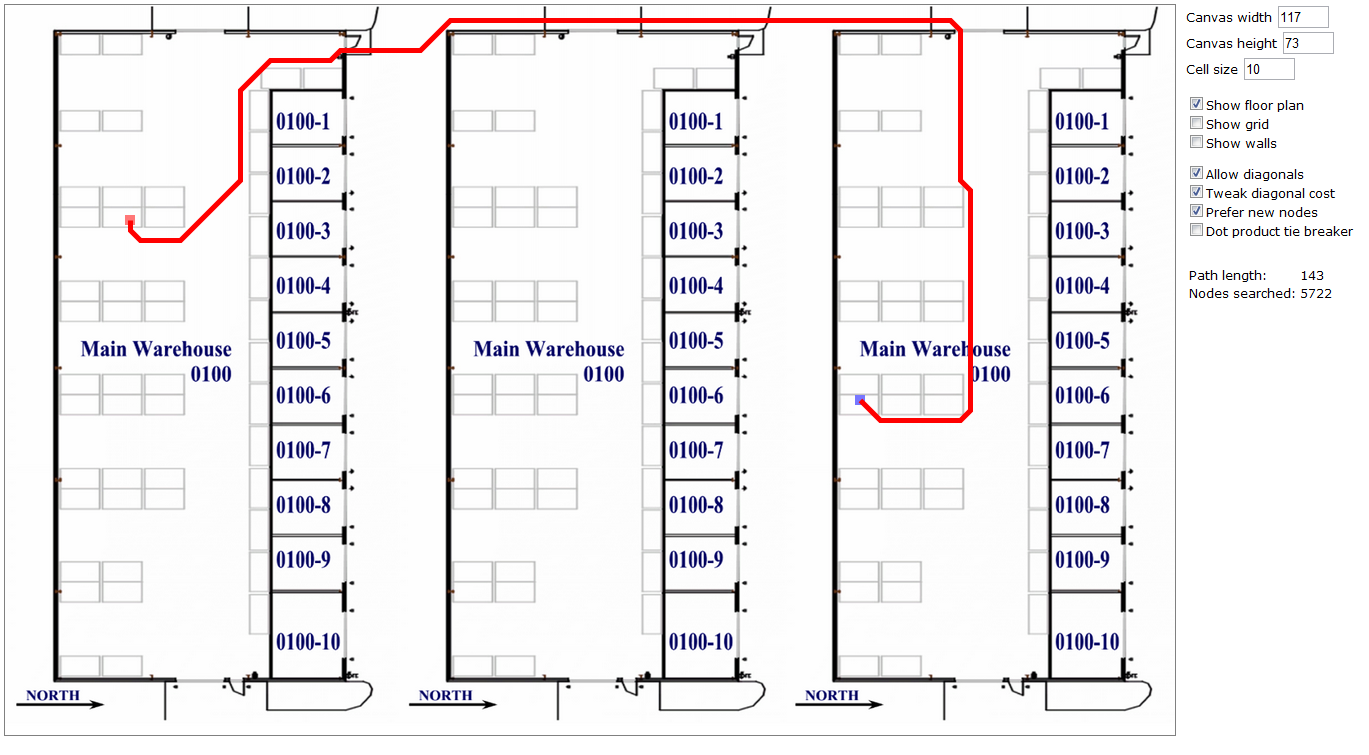
And there is more work to be done. For instance, the calculation responds quickly on my laptop for about 11 picking list lines, perhaps 13 with the ant colony optimization, but beyond that the calculation time grows exponentially beyond useful. Also, the calculation does not take into account bottleneck or collision avoidance for forklifts. Currently, this project is a great proof-of-concept to be further explored.
When Google Maps launched their outstanding Indoor Maps I had shelved my small project. But Google Indoor Maps requires the maps to be public which our M3 customers are reluctant to do. So for Inforum this week, I un-boxed my project and integrated it in my Google Glass demo. Here below are some screenshots of the project. I will be writing a series of posts soon on how to implement it. And I would like your feedback.
In future work, I will implement the same proof-of-concept using Google Indoor Maps.


3 thoughts on “Walking directions in a warehouse”